ROBOSAT
About the Project
VISION
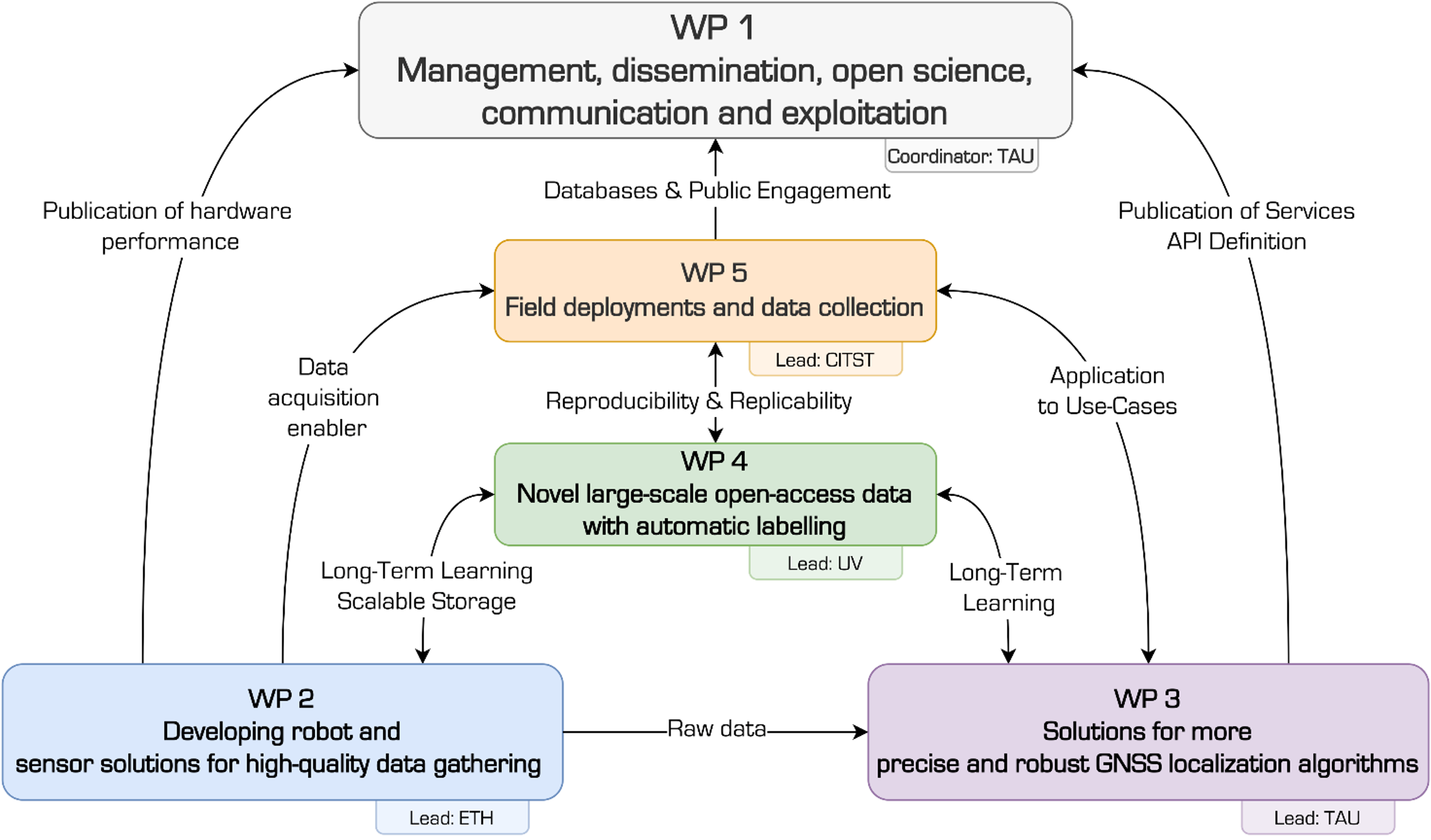
Our vision in ROBOSAT is to collectively harness the potential of multi-dimensional satellite-based 3D geographic information systems (MultiGIS), the power of robotics, the Global Navigation Satellite Systems (GNSS) and AI/ Machine Learning (ML) in order to:
- Make a scientific breakthrough contribution to autonomous collection of high-quality synchronized data in unstructured environments using mobile robots and innovative hardware developed within the project;
- Advance novel AI-based data management systems to handle efficiently the complexity of GIS and multi-sensor data;
- Use MultiGIS data to improve GNSS systems and to mitigate noise and interference effects;
- Develop open-source outputs and accessibility tools that can be utilized by diverse communities for scientific and technological advances in robotics, environmental protection, forestry, logistics, search and rescue, and more.
Robots can provide a means for systematic and scalable data collection in the wild, which is currently not possible. The MultiGIS data that we collect will enable research beyond the use-cases we show in this project, namely improving GNSS algorithms; such improvements directly translate into higher-quality MultiGIS data. Finally, we will provide an unprecedented amount of open-source data that is indexed and retrieved using AI and Natural Language Processing (NLP) tools, so that we can quickly provide data with a requested set of characteristics.